This page was generated from notebooks/1C - Lotka-Volterra.ipynb.
Example C - Lotka-Volterra#
(works only with Swyft 0.4.4; to be updated soon)
Authors: Noemi Anau Montel, James Alvey, Christoph Weniger
Last update: 27 April 2023
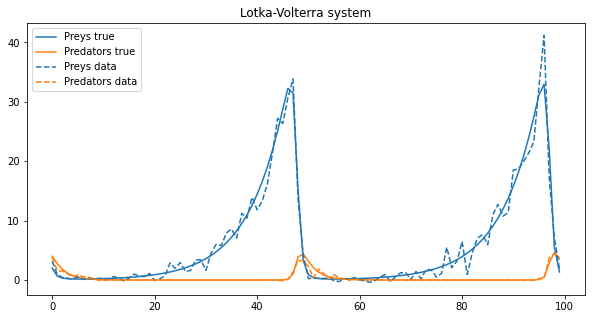
Let’s now use a toy model for the dynamic of a biological system in which two species interact, one as predator and the other as prey. This is usually described by the Lotka–Volterra equations, also known as the predator–prey equations, a pair of first-order nonlinear differential equations.
[ ]:
import numpy as np
import swyft
import pylab as plt
import scipy
import torch
from scipy import stats
from pytorch_lightning.callbacks import LearningRateMonitor, ModelCheckpoint
from pytorch_lightning.callbacks.early_stopping import EarlyStopping
In order to make our simulator quicker in solving the differential equations, we will use JAX.
[ ]:
!pip install diffrax
import diffrax
from diffrax import diffeqsolve, ODETerm, SaveAt, PIDController, Dopri5, DiscreteTerminatingEvent
import jax
import jax.numpy as jnp
Looking in indexes: https://pypi.org/simple, https://us-python.pkg.dev/colab-wheels/public/simple/
Collecting diffrax
Downloading diffrax-0.2.2-py3-none-any.whl (138 kB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 138.1/138.1 KB 9.0 MB/s eta 0:00:00
Collecting equinox>=0.9.1
Downloading equinox-0.9.2-py3-none-any.whl (88 kB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 88.3/88.3 KB 13.3 MB/s eta 0:00:00
Requirement already satisfied: jax>=0.3.4 in /usr/local/lib/python3.8/dist-packages (from diffrax) (0.3.25)
Collecting jaxtyping>=0.2.5
Downloading jaxtyping-0.2.11-py3-none-any.whl (19 kB)
Requirement already satisfied: scipy>=1.5 in /usr/local/lib/python3.8/dist-packages (from jax>=0.3.4->diffrax) (1.7.3)
Requirement already satisfied: typing-extensions in /usr/local/lib/python3.8/dist-packages (from jax>=0.3.4->diffrax) (4.4.0)
Requirement already satisfied: numpy>=1.20 in /usr/local/lib/python3.8/dist-packages (from jax>=0.3.4->diffrax) (1.21.6)
Requirement already satisfied: opt-einsum in /usr/local/lib/python3.8/dist-packages (from jax>=0.3.4->diffrax) (3.3.0)
Collecting typeguard>=2.13.3
Downloading typeguard-2.13.3-py3-none-any.whl (17 kB)
Installing collected packages: typeguard, jaxtyping, equinox, diffrax
Attempting uninstall: typeguard
Found existing installation: typeguard 2.7.1
Uninstalling typeguard-2.7.1:
Successfully uninstalled typeguard-2.7.1
Successfully installed diffrax-0.2.2 equinox-0.9.2 jaxtyping-0.2.11 typeguard-2.13.3
[ ]:
_lv_solver = Dopri5()
@jax.jit
def lv_deriv(t, Y, args):
alpha, beta, gamma, delta = args
dY = jnp.array([alpha * Y[0] - beta * Y[0] * Y[1], delta * Y[0] * Y[1] - gamma * Y[1]])
return dY
@jax.jit
def lv_solver_dense(Y0, tspan, params, rtol=1e-7, atol=1e-7):
term = ODETerm(lv_deriv)
solver = _lv_solver
saveat = SaveAt(t0=False, t1=True, ts=None, dense=True)
stepsize_controller = PIDController(rtol=rtol, atol=atol)
solution = diffeqsolve(terms=term,
solver=solver,
t0=tspan[0], t1=tspan[1],
y0=Y0,
dt0=None,
args=params,
saveat=saveat,
stepsize_controller=stepsize_controller,
discrete_terminating_event=None)
Y_fun = jax.jit(jax.vmap(solution.evaluate, (0)))
ts = jnp.linspace(tspan[0], tspan[1], 100)
return Y_fun(ts)
lv_solver_dense_vmap = jax.jit(jax.vmap(lv_solver_dense, (0, None, 0)))
Here is our simulator. This model is adapted from arxiv:2209.11057.
[ ]:
class Simulator(swyft.Simulator):
def __init__(self, Y0 = np.array([2, 4]), tmax = 50, bounds=None):
super().__init__()
self.transform_samples = swyft.to_numpy32
self.bounds=bounds
# Initial conditions
self.Y0 = Y0 # initial number of preys and predators
# Timesteps
self.tmax = tmax # maximum time
def get_params(self):
"""
Get Lotka-Volterra parameters:
- alpha: intrinsic preys reproduction rate
- beta: preys mortality rate due to predators encountered
- gamma: predator reproduction rate according to preys encountered and eaten
- delta: intrinsic predator mortality rate
"""
return swyft.RectBoundSampler(stats.uniform(np.array([0., 0., 0., 0.]), np.array([1.5, 1., 1., 1.])), bounds = self.bounds)()
def get_evolution(self, z):
"""
Solves Lotka-Volterra ODEs for one prey and one predator species and
returns the number of preys X and predators Y at given timestep.
"""
Ytrue = np.asarray(lv_solver_dense(Y0=jnp.array(self.Y0),
tspan=jnp.array([0., self.tmax]),
params=jnp.array(z)).T).copy()
Ytrue[np.where(Ytrue<=0)] = 1e-20
return Ytrue
def get_demographic_noise(self, Ytrue, R=0.3):
"""
Add demographic noise with zero mean and variance proportional to
the true underlying population.
"""
YDnoise = Ytrue + np.sqrt(R*Ytrue) * np.random.randn(*Ytrue.shape)
return YDnoise
def build(self, graph):
z = graph.node('z', self.get_params)
Ytrue = graph.node('Ytrue', self.get_evolution, z)
YDnoise = graph.node('YDnoise', self.get_demographic_noise, Ytrue)
[ ]:
sim = Simulator()
obs = sim.sample()
# Plot
plt.figure(figsize=(10,5))
plt.plot(obs['Ytrue'][0], label="Preys true")
plt.plot(obs['Ytrue'][1], label="Predators true")
plt.plot(obs['YDnoise'][0], c='tab:blue', ls='--', label="Preys data")
plt.plot(obs['YDnoise'][1], c='tab:orange', ls='--', label="Predators data")
plt.legend(loc="best")
plt.title("Lotka-Volterra system")
plt.show()
Now we define a simple network to perform the data compression and generate the logratios. This can certainly be improved though!
[ ]:
class Network(swyft.SwyftModule):
def __init__(self, lr = 1e-3, gamma = 1.):
super().__init__()
self.optimizer_init = swyft.OptimizerInit(torch.optim.Adam, dict(lr = lr),
torch.optim.lr_scheduler.ExponentialLR, dict(gamma = gamma))
self.logratios = swyft.LogRatioEstimator_1dim(num_features = 10, num_params = 4, varnames = 'z', dropout = 0.0)
self.net = torch.nn.Sequential(
torch.nn.Linear(100, 256),
torch.nn.ReLU(),
torch.nn.Linear(256, 128),
torch.nn.ReLU(),
torch.nn.Linear(128, 32),
torch.nn.ReLU(),
torch.nn.Flatten(),
torch.nn.Linear(64, 10),
torch.nn.ReLU()
)
def forward(self, A, B):
f = self.net(A['YDnoise'])
logratios = self.logratios(f, B['z'])
return logratios
[ ]:
def round(obs, bounds = None):
sim = Simulator(bounds = bounds)
samples = sim.sample(10000)
dm = swyft.SwyftDataModule(samples, fractions = [0.7, 0.2, 0.1], num_workers = 3, batch_size = 64, on_after_load_sample=sim.get_resampler(targets = ["YDnoise"]))
lr_monitor = LearningRateMonitor(logging_interval='step')
early_stopping_callback = EarlyStopping(monitor='val_loss', min_delta = 0., patience=5, verbose=False, mode='min')
checkpoint_callback = ModelCheckpoint(monitor='val_loss', dirpath='./logs/', filename='lv_{epoch}_{val_loss:.2f}_{train_loss:.2f}', mode='min')
trainer = swyft.SwyftTrainer(accelerator = 'gpu', max_epochs = 20, callbacks=[lr_monitor, early_stopping_callback])
network = Network()
trainer.fit(network, dm)
checkpoint_callback.to_yaml("./logs/lv.yaml")
ckpt_path = swyft.best_from_yaml("./logs/lv.yaml")
trainer.test(network, dm, ckpt_path = ckpt_path)
prior_samples = sim.sample(N = 10000, targets = ['z'])
predictions = trainer.infer(network, obs, prior_samples)
new_bounds = swyft.collect_rect_bounds(predictions, 'z', (4,), threshold = 1e-5)
return predictions, new_bounds, samples
[ ]:
bounds = None
prediction_rounds = []
bounds_rounds = []
samples_rounds = []
for n in range(3):
predictions, bounds, samples = round(obs, bounds = bounds)
prediction_rounds.append(predictions)
bounds_rounds.append(bounds)
samples_rounds.append(samples)
print("New bounds:", bounds)
INFO:pytorch_lightning.utilities.rank_zero:GPU available: True (cuda), used: True
INFO:pytorch_lightning.utilities.rank_zero:TPU available: False, using: 0 TPU cores
INFO:pytorch_lightning.utilities.rank_zero:IPU available: False, using: 0 IPUs
INFO:pytorch_lightning.utilities.rank_zero:HPU available: False, using: 0 HPUs
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
INFO:pytorch_lightning.callbacks.model_summary:
| Name | Type | Params
-----------------------------------------------------
0 | logratios | LogRatioEstimator_1dim | 71.9 K
1 | net | Sequential | 63.5 K
-----------------------------------------------------
135 K Trainable params
0 Non-trainable params
135 K Total params
0.542 Total estimated model params size (MB)
/usr/local/lib/python3.8/dist-packages/torch/utils/data/dataloader.py:554: UserWarning: This DataLoader will create 3 worker processes in total. Our suggested max number of worker in current system is 2, which is smaller than what this DataLoader is going to create. Please be aware that excessive worker creation might get DataLoader running slow or even freeze, lower the worker number to avoid potential slowness/freeze if necessary.
warnings.warn(_create_warning_msg(
/usr/local/lib/python3.8/dist-packages/pytorch_lightning/trainer/call.py:48: UserWarning: Detected KeyboardInterrupt, attempting graceful shutdown...
rank_zero_warn("Detected KeyboardInterrupt, attempting graceful shutdown...")
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
Test metric DataLoader 0
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
test_loss -1.8827433586120605
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
New bounds: tensor([[3.5697e-05, 1.4996e+00],
[8.8303e-05, 9.9993e-01],
[1.1083e-01, 9.9984e-01],
[2.9122e-05, 7.8809e-01]])
INFO:pytorch_lightning.utilities.rank_zero:GPU available: True (cuda), used: True
INFO:pytorch_lightning.utilities.rank_zero:TPU available: False, using: 0 TPU cores
INFO:pytorch_lightning.utilities.rank_zero:IPU available: False, using: 0 IPUs
INFO:pytorch_lightning.utilities.rank_zero:HPU available: False, using: 0 HPUs
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
INFO:pytorch_lightning.callbacks.model_summary:
| Name | Type | Params
-----------------------------------------------------
0 | logratios | LogRatioEstimator_1dim | 71.9 K
1 | net | Sequential | 63.5 K
-----------------------------------------------------
135 K Trainable params
0 Non-trainable params
135 K Total params
0.542 Total estimated model params size (MB)
INFO:pytorch_lightning.utilities.rank_zero:`Trainer.fit` stopped: `max_epochs=20` reached.
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
Test metric DataLoader 0
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
test_loss -1.8446929454803467
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
New bounds: tensor([[4.9141e-05, 1.4995e+00],
[4.3906e-04, 9.9991e-01],
[1.1613e-01, 9.9969e-01],
[2.0347e-04, 7.8798e-01]])
INFO:pytorch_lightning.utilities.rank_zero:GPU available: True (cuda), used: True
INFO:pytorch_lightning.utilities.rank_zero:TPU available: False, using: 0 TPU cores
INFO:pytorch_lightning.utilities.rank_zero:IPU available: False, using: 0 IPUs
INFO:pytorch_lightning.utilities.rank_zero:HPU available: False, using: 0 HPUs
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
INFO:pytorch_lightning.callbacks.model_summary:
| Name | Type | Params
-----------------------------------------------------
0 | logratios | LogRatioEstimator_1dim | 71.9 K
1 | net | Sequential | 63.5 K
-----------------------------------------------------
135 K Trainable params
0 Non-trainable params
135 K Total params
0.542 Total estimated model params size (MB)
INFO:pytorch_lightning.utilities.rank_zero:`Trainer.fit` stopped: `max_epochs=20` reached.
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
Test metric DataLoader 0
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
test_loss -2.200033664703369
────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
INFO:pytorch_lightning.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
New bounds: tensor([[4.3150e-04, 6.6515e-01],
[1.4022e-01, 9.9968e-01],
[2.0927e-01, 9.9965e-01],
[2.3018e-04, 5.4193e-01]])
[ ]:
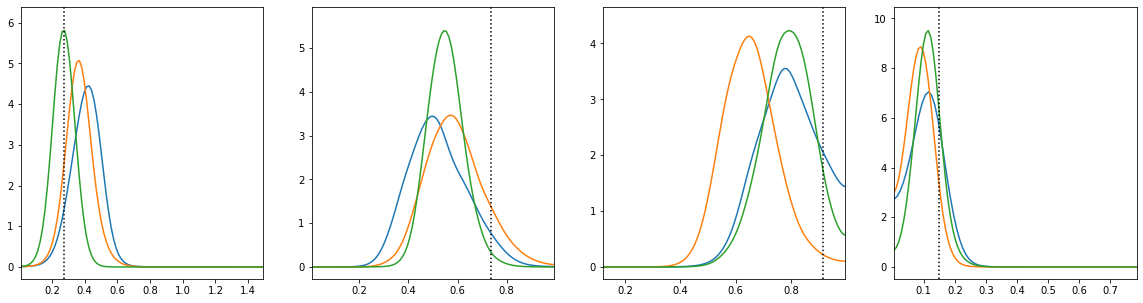
truth = {k: v for k, v in zip(["z[%i]"%i for i in range(4)], obs['z'])}
colors = ['tab:blue', 'tab:orange', 'tab:green']
fig, axes = plt.subplots(1, 4, figsize = (20, 5))
for i in range(4):
swyft.plot_posterior(prediction_rounds[i], ["z[%i]"%i for i in range(4)], fig=fig, truth=truth, smooth = 3, bins = 100, contours = False, color=colors[i])
This page was generated from notebooks/1C - Lotka-Volterra.ipynb.